
| 品牌 | 其他品牌 | 产地类别 | 进口 |
|---|
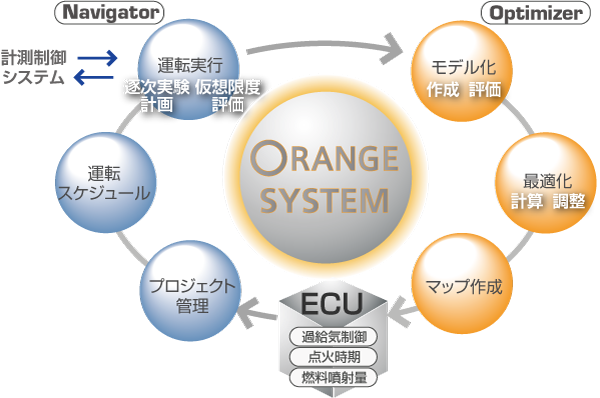
ORANGE Navigator是一个应用程序,可为汽油发动机和柴油发动机创建并执行校准测试操作计划。
您可以设置与实验计划相关的条件,例如自动操作所需的测量值的监视状态和外部设备的控制设置。
日本小野ORANGE系统

| 运营环境 | 目录 | 词汇表 | 问答 |
|---|
- 日本小野ORANGE系统
- 日本小野ORANGE系统
概观

ORANGE Navigator是一个应用程序,可为汽油发动机和柴油发动机创建并执行校准测试操作计划。
您可以设置与实验计划相关的条件,例如自动操作所需的测量值的监视状态和外部设备的控制设置。
实验设计可以通过操作时间表和实验设计(DOE)来创建,因此它也可以用作实验规划工具。

ORANGE Optimizer可以根据收集的数据通过响应面法创建的ECU图。有三种建模方法和八种优化方法。
建模方法配备有“区域划分模型”,可以对多项式模型中不适合的测量项(如烟雾)进行高精度建模。
另外,在优化方法中增加了驾驶模拟,并且可以创建与驾驶模式测试匹配的ECU图。由于可以使用适合每次的方法执行优化,因此可以有效地创建ECU映射。
创建的ECU映射可以通过ASAM-MCD-3MC传输到ECU监视器。
瞬态选项
随着发动机,混合动力汽车和电气化等车辆动力发动机的变化,车辆的适配参数数量巨大,适应过程数量巨大。此外,瞬态模式操作中的排放法规要求在评估动力发动机的瞬态特性的同时调整参数。
瞬态ORANGE可以通过创建耦合模型来模拟操作,其中瞬态元素模型连接到稳态模型。通过改变校准参数的设定值并执行突变,可以找到适合于瞬态操作的参数值。
ORANGE Navigator使用稳态DoE结果自动生成Ono Sokki独特的操作模式,并测量操作以创建瞬态元素模型。
ORANGE Optimizer可以使用测量数据,扩展延迟模型和稳态模型,连接各自的模型,以及创建,执行和优化瞬态仿真模型。

操作计划和实验计划的综合管理
通过与FAMS系统链接,可以顺序输出操作模式
支持各种实验设计方法(DOE),以实现高维(高达20维)*性测试计划
沿测试流程的简单操作可实现复杂的校准测试
配备ECU参数和边界计划的极限点搜索功能
通过准备几种极限点搜索方法,可以根据目的进行有效的极限搜索实验
瞬态选项
·自动生成用于扩展静止模型的操作模式
– 多个录制文件可以集体传送到ORANGE Optimizer。


管理项目中合规操作的测试条件。
– 操作模式设定
– 工作台连接设定
– ECU监视设定
– 各种规格的设定-
地图设定
– 处理程序的设定

设置执行操作和测量的计划条件。
您可以通过显示数值数据和图表来评估实验设计结果。
稳态DoE
·设定运行/测量执行所需的控制条件
使用大块设置发电机和油门
的控制使用各种实验设计方法使用小块设置更改和ECU参数的测量
·在各种实验设计方法(DOE)制作实验计划
用Extra Block设定更精细的扫描测量
瞬态选项
·为延迟模型创建操作模式(扭矩变化测量)
·为稳态模型的扩展创建运行模式(旋转扭矩变化测量)

将操作命令输出到FAMS系统并执行每个测试。可以通过监视器部件和日志实时检查运行测试和测量数据。
稳态DoE
瞬态选项

测试结果可以通过监视器部件和日志确认。
– 为每个项目管理测量数据文件。
– 可以以表格形式 – 图表形式(2D,3D,散点矩阵)表达数据。
·多个扭矩变化测量文件和旋转扭矩变化测量文件可以与测试条件组合成一个zip文件并移交给ORANGE Optimizer。


除了本地模型,还可以为整个操作区域创建大面积模型
实现多目标优化(局部优化,全局优化),多可达20个目标
通过使用全局优化结果执行平滑的ECU图搜索,不必调整ECU图的不均匀性
在高维度(多20个维度)内实现优化
通用驾驶模式反映在稳态全局优化的驾驶模拟优化中
瞬态选项
- 立即从导航器导入多个录制文件,并自动将它们部署到项目中。
·可以创建延迟模型和扩展静态模型。
·以图形方式连接稳态模型,滞后模型和扩展稳态模型,以创建瞬态仿真模型。
·使用任意模式模式执行瞬态模拟。


响应面模型可以通过基于收集的数据进行拟合或插值来创建。
可以基于三种类型的方法执行建模。
高阶多项式模型
这是一种通过多项式近似创建模型的方法。
您可以根据物理现象创建多5个订单的模型。
RBF模型
这是一种通过叠加局部高斯函数来插入任意函数的方法。
它也可以应用于不能应用于其他拟合模型的多模态响应。
区域分割模型
在该方法中,区域被划分并且为每个区域创建线性或二次近似模型以平滑地连接区域。它可以应用于具有拐点的响应。

延迟模型
使用稳态模型,假设无延迟响应,与测量的扭矩变化测量数据进行比较,并计算延迟时间。
扩展的固定模型
对于大面积稳态模型,提供测量数据以使状态量(例如,温度)改变,并且生成可以表现出瞬态特性的模型。
型号连接
连接稳态模型,滞后模型和扩展稳态模型,以创建复杂的瞬态仿真模型。

根据确定的点创建任何网格的地图。可以创建的地图大小多为40×40。网格点计算的插值方法准备网格插值,三角网格,AKIMA插值。您还可以使用3D图直接直观地调整ECU地图的形状。
创建的ECU映射可以通过ASAM-MCD-3MC传输到ECU监视器。
ORANGE Navigator规格
| 物品名称 | 规范 | 备注 | |||
|---|---|---|---|---|---|
| 数据导入规范 | 型号:逗号分隔文件(.csv) | ||||
| 边际点搜索 | 技术 | 方向数量 | 摘要 | ||
| 固定方法搜索 | 4或8 | 它是搜索正交4个方向和8个方向的函数。 (它支持步骤搜索和斜率搜索) |
|||
| 顺序极限点搜索 | – | 您可以通过考虑搜索结果灵活地更改搜索方向进行搜索。 (它支持步骤搜索和斜率搜索) |
|||
| 边界计划 | 技术 | 设计变量 | 级别数 | 摘要 | |
| 可选计划 | – | – | 提前规划 | 您可以自由设置计划点 | |
| 全因素计划 | 1至5 | 3 | 您可以设计三个级别的所有组合的实验 | ||
| 中央复合(中心组合设计) | 2至20 | 五 | 适用于近似二阶响应相位的实验设计 | ||
|
面中心 – 立方(面心网格设计) |
2至20 | 3 | |||
| 箱Behnken法 | 3到7 | 3 | |||
| 计划 | 1至20 | 2至20 | 基于模型的实验设计允许您设计多5个订单的实验。它也可以用于边界模型中的实验设计。 | ||
| 拉丁超级广场计划 | 2至20 | – | 该设计方法将设计空间划分为网格,使设计点均匀分布,并考虑交叉点处的设计点。 | ||
| 凸边界碰撞规划 | 2至20 | – | 即使在难以优化设计和空间填充设计的条件下,也可以生成边界实验设计的实验设计方法。 | ||
| 空间填充计划 | – | – | 预先计划 或 顺序实验 |
计划是尽可能地扩散而不重叠,并且限度地均匀地布置两点之间的距离。 您可以在边界模型中进行良好的分散计划。 |
|
| 边界模型 | 技术 | 摘要 | |||
| 凸壳模型 | 使用由极限点搜索功能收集的数据通过凸包计算创建边界模型。 | ||||
ORANGE优化器规范
| 物品名称 | 规范 | 备注 | ||||
|---|---|---|---|---|---|---|
| 数据导入能力 | 物品数量:多512个 | |||||
| 数据点数:高达1000万点 | ||||||
| 数据导入格式 | 文本文件(.txt),CSV文件(.csv),TSV文件(.tsv),Microsoft Excel工作簿(.xls) | |||||
| 模型 | 技术 | 度 | 设计变量 | 摘要 | ||
| 多项式模型 | 5分 | 多10个 | 您可以根据物理现象创建多5阶的响应曲面。 | |||
| RBF模型 | – | 多10个 | 通过叠加高斯函数,您可以创建多模式响应曲面。 | |||
| LOLIMOT模型 | – | 多10个 | 通过将多10个变量的设计空间划分为小区域并使用一阶多项式模型逼近小区域,可以创建具有拐点的响应曲面。 | |||
| 优化 | 当地 | 技术 | 客观变量 | 约束变量 | 摘要 | |
| 单一目的 | 1 | 多9个 | 一种找到小化或化一个目标函数的解的方法 | |||
| 单一GA | 1 | 多9个 | 使用GA执行单一目的优化 | |||
| 客观规划方法 | 总计10(目标变量是2或更多) | 将GA用于多个目标函数 | ||||
|
NBI方法 |
2 | 多8个 | 这是一种在Rice大学开发的非线性多目标优化问题中寻找Pareto解集的方法。 | |||
| 多用途GA | 总计10 | 这是一种在多目标优化问题中寻找Pareto解集的方法,用于模拟自然选择。 | ||||
| 全球 | 多用途GA | 总计10(目标变量是2或更多) | 从当地的Pareto解决方案中,您可以找到的解决方案组合。 | |||
| 驾驶模拟 | 总计10(目标变量是2或更多) | 从本地Pareto解决方案中,您可以找到优化模式操作模拟结果的解决方案组合。 | ||||
| 当选择全局值时,可以使用ECU图的平滑度作为指标来执行值搜索 | ||||||
| 稳健性 | 您可以优化稳健性。通过对鲁棒性建模并将其设置为目标变量,您可以找到具有高稳健性的解决方案。 | |||||
| ECU地图 | ECU地图创建:40 x 40 | |||||
| 与ECU监视器的通信功能:符合ASAM-MCD-3MC标准 | ||||||
| 插值方法:点阵插值,AKIMA插值,三角网格 | ||||||
产品清单
| 项目 | 输入名称 | 备注 |
|---|---|---|
| ORANGE Navigator主机 | OP-4100 | |
| ORANGE优化器 | OP-4200 | |
| ORANGE优化器网络许可 | OP-4200N |
运营环境
| 项目 | 产品规格 | 备注 |
|---|---|---|
| OS | Microsoft®Windows®XPSP3或Windows®Vista,Windows 7 | – |
| CPU | 英特尔®酷睿™2双核2.3 GHz或更高 | – |
| 记忆 | 1GB或更多(Windows®Vista为2GB或更多) | |
| 硬盘 | 1 GB或更多的可用空间 | – |
| 显示 | 1280 x 1024或更多可显示 |
※足够的CPU,内存,硬盘的规格根据要处理的数据大小而不同
* Windows®XP和Microsoft®是Microsoft Corporation在美国和其他国家/ 地区的注册商标或商标。
* Intel®和Pentium®是Intel Corporation在美国和其他国家/ 地区的注册商标。